핵심 요약
고정밀(HD) 지도는 자율주행 시스템의 핵심 요소이지만, 실제 도로 상황과 일치하지 않거나 데이터가 누락된 커버리지 갭 문제가 상존한다. 이러한 갭은 위치 추정 오류와 경로 계획 실패를 유발하여 안전 사고의 원인이 되므로, 실제 도로 테스트의 한계를 보완하는 시뮬레이션 기반 검증이 필수적이다. 시나리오 기반 시뮬레이션과 스트레스 테스트를 통해 맵의 취약점을 파악하고, 자동화된 탐지 도구와 전문가의 검수를 결합하여 데이터의 신뢰성을 확보해야 한다. 결과적으로 고품질의 어노테이션 데이터와 체계적인 시뮬레이션 워크플로우가 자율주행 시스템의 완성도를 결정짓는다.
배경
자율주행 시스템 아키텍처(Perception, Localization, Planning)에 대한 이해, HD 맵(High-Definition Map)의 기본 개념, 자율주행 시뮬레이터(CARLA 등) 활용 경험
대상 독자
자율주행 시스템 개발자, HD 맵 데이터 엔지니어, ADAS 성능 평가 전문가
의미 / 영향
HD 맵의 품질 관리가 자율주행 상용화의 핵심 병목임을 시사하며, 시뮬레이션과 고정밀 어노테이션의 결합이 안전성 확보를 위한 표준 워크플로우로 자리 잡을 것임을 보여준다.
섹션별 상세
이미지 분석
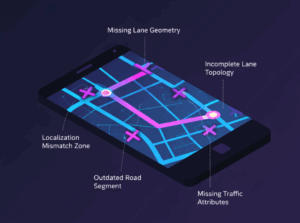
누락된 차선 기하학, 불완전한 차선 토폴로지, 오래된 도로 세그먼트 등 HD 맵의 주요 오류 지점들을 모바일 기기 화면상의 지도로 예시한다. 각 오류가 위치 추정 불일치 구역(Localization Mismatch Zone)을 어떻게 형성하는지 직관적으로 보여준다.
HD 맵에서 발생할 수 있는 다양한 커버리지 갭 유형을 시각화한 다이어그램이다.
실무 Takeaway
- HD 맵의 커버리지 갭은 자율주행차의 위치 추정 및 경로 계획 실패를 유발하는 직접적인 요인이므로 배포 전 전수 검증이 필수적이다.
- 시나리오 기반 및 스트레스 테스트 시뮬레이션을 통해 실제 도로에서 재현하기 어려운 엣지 케이스와 시스템 허용 한계를 안전하게 파악해야 한다.
- 자동화 도구에만 의존하지 않고 전문가의 수동 검수를 결합하여 데이터 정확도를 95% 이상으로 확보해야 시뮬레이션 결과의 신뢰성을 보장할 수 있다.
언급된 리소스
AI 요약 · 북마크 · 개인 피드 설정 — 무료