이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
핵심 요약
YOLO(You Only Look Once)는 비디오에서 실시간으로 여러 객체를 식별하고 위치를 파악할 수 있는 고속 딥 뉴럴 네트워크 아키텍처이다. 기존의 2단계 방식과 달리 단일 통과(One-pass)로 분류와 지역화를 동시에 수행하여 높은 프레임 속도를 구현한다. 본 아키텍처는 입력 이미지를 그리드로 나누고, 각 셀에서 객체 확률과 바운딩 박스 좌표를 예측하는 방식을 취한다. 2015년 첫 등장 이후 v12에 이르기까지 어텐션 메커니즘 도입과 효율성 최적화를 통해 성능을 지속적으로 개선해왔다.
배경
Convolutional Neural Networks (CNN) 기본 개념, 딥러닝 학습 및 추론 프로세스 이해, 바운딩 박스 및 객체 분류 개념
대상 독자
컴퓨터 비전 엔지니어 및 실시간 객체 탐지 시스템 개발자
의미 / 영향
YOLO의 지속적인 발전은 엣지 디바이스에서도 고성능 객체 탐지를 가능하게 하여 자율 주행 및 스마트 시티 인프라 확산에 기여한다. 특히 최신 버전들의 효율성 개선은 하드웨어 요구 사양을 낮추면서도 정확도를 높이는 방향으로 진화하고 있다.
섹션별 상세
YOLO는 입력 이미지를 고정된 그리드(예: 7x7)로 분할하여 각 셀을 독립적인 하위 이미지로 처리하며, 전체 이미지를 단 한 번의 ConvNet 통과로 분석한다.
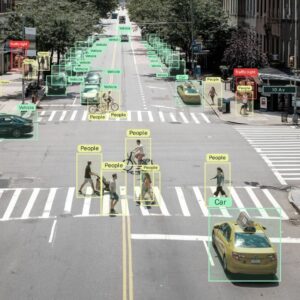
출력 텐서는 객체 분류 정보와 바운딩 박스의 좌표(중심점, 높이, 너비)를 모두 포함하며, 이를 통해 초당 65프레임 이상의 실시간 추론 속도를 확보한다.

하나의 그리드 셀 내에 여러 객체가 존재할 경우를 대비해 다양한 크기와 비율의 앵커 박스(Anchor Boxes)를 사용하여 객체 탐지의 정확도를 높인다.


중복된 탐지 결과를 제거하기 위해 비최대 억제(Non-Max Suppression) 알고리즘을 적용하여 가장 높은 확률을 가진 바운딩 박스만 남기고 나머지는 제거한다.
YOLOv1부터 시작하여 v12까지 발전하며 배치 정규화, 어텐션 블록(C3k2, C2PSA), NMS-free 학습 등 다양한 기술적 혁신을 도입했다.

최신 버전인 YOLOv12는 어텐션 중심 설계를 통해 CNN 기반의 속도를 유지하면서도 트랜스포머 수준의 높은 정확도를 제공한다.
실무 Takeaway
- 실시간성이 중요한 자율 주행이나 로보틱스 분야에서는 2단계 모델보다 YOLO와 같은 단일 통과 방식의 모델이 더 적합하다.
- 객체가 겹치거나 밀집된 환경에서는 적절한 크기의 앵커 박스를 설정하고 NMS 임계값을 튜닝하여 탐지 누락을 방지해야 한다.
- 최신 YOLOv12는 효율적인 영역 어텐션(A2) 모듈을 도입하여 기존 CNN 기반 모델의 속도와 트랜스포머의 정확도를 결합했다.
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 01. 29.수집 2026. 02. 21.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.