TL;DR
LiDAR 센서는 자율주행의 핵심이지만 밀집된 도심 환경에서는 가려짐 현상과 신호 노이즈로 인해 인식 성능이 정체되는 한계가 있다. 특히 안개 상황에서 반사 포인트 수가 최대 59%까지 감소하며 객체 경계 정의가 어려워지는 문제가 발생한다. 이를 해결하기 위해 단순 데이터 증설보다는 교차로 및 공사 구역 등 특정 시나리오 중심의 데이터셋 확장이 필요하다. 또한 LiDAR와 카메라, 레이더 간의 정밀한 공간적·시간적 정렬을 통해 퓨전 모델의 신뢰성을 확보해야 한다. 최종적으로 전문가 검토 기반의 고품질 어노테이션 워크플로우를 구축함으로써 도심 주행의 안전성을 높일 수 있다.
배경
LiDAR 센서의 기본 작동 원리, 3D 포인트 클라우드 데이터 구조, 자율주행 센서 퓨전(Sensor Fusion) 개념
대상 독자
자율주행 인식 알고리즘 개발자 및 ML 데이터 운영 전문가
의미 / 영향
이 아티클은 자율주행 시스템이 고속도로를 넘어 복잡한 도심으로 확장될 때 직면하는 데이터 품질 문제를 구체적으로 짚어줍니다. 특히 센서 퓨전과 시계열 라벨링의 중요성을 강조하며, 단순한 모델 개선보다 고품질의 특수 시나리오 데이터 확보가 성능 정체를 해결하는 열쇠임을 시사합니다.
섹션별 상세
- 시나리오 중심의 데이터셋 확장은 밀집된 교차로와 공사 구역에서의 인식 안정성을 높인다. — Scenario-Focused Dataset Expansion 섹션
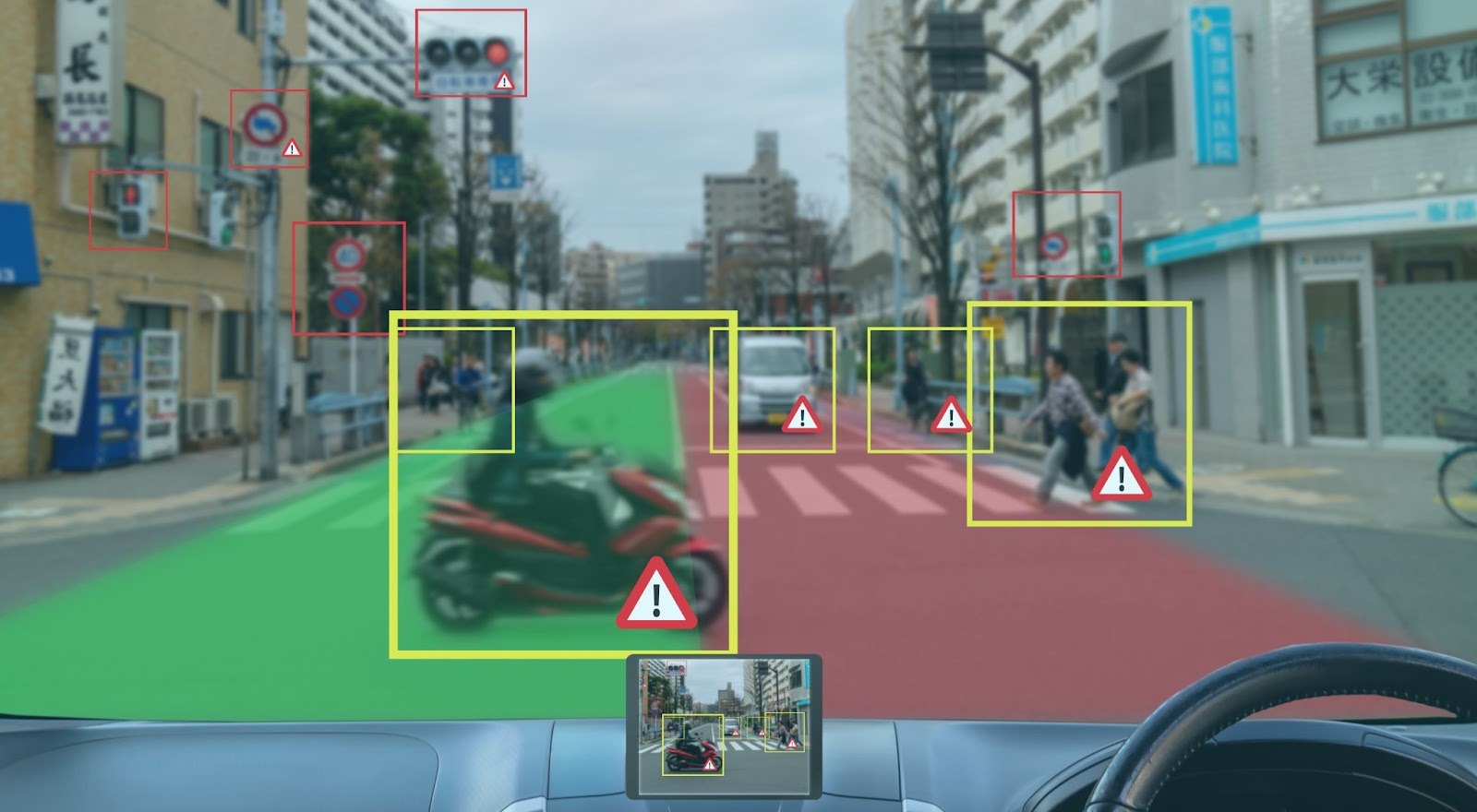
- 가시거리 50m 이하의 짙은 안개 조건에서 LiDAR 반사 포인트 수(NPC)는 최대 59% 감소할 수 있다. — Why City Environments are Hard for LiDAR Perception Models 섹션의 마지막 문단
이미지 분석
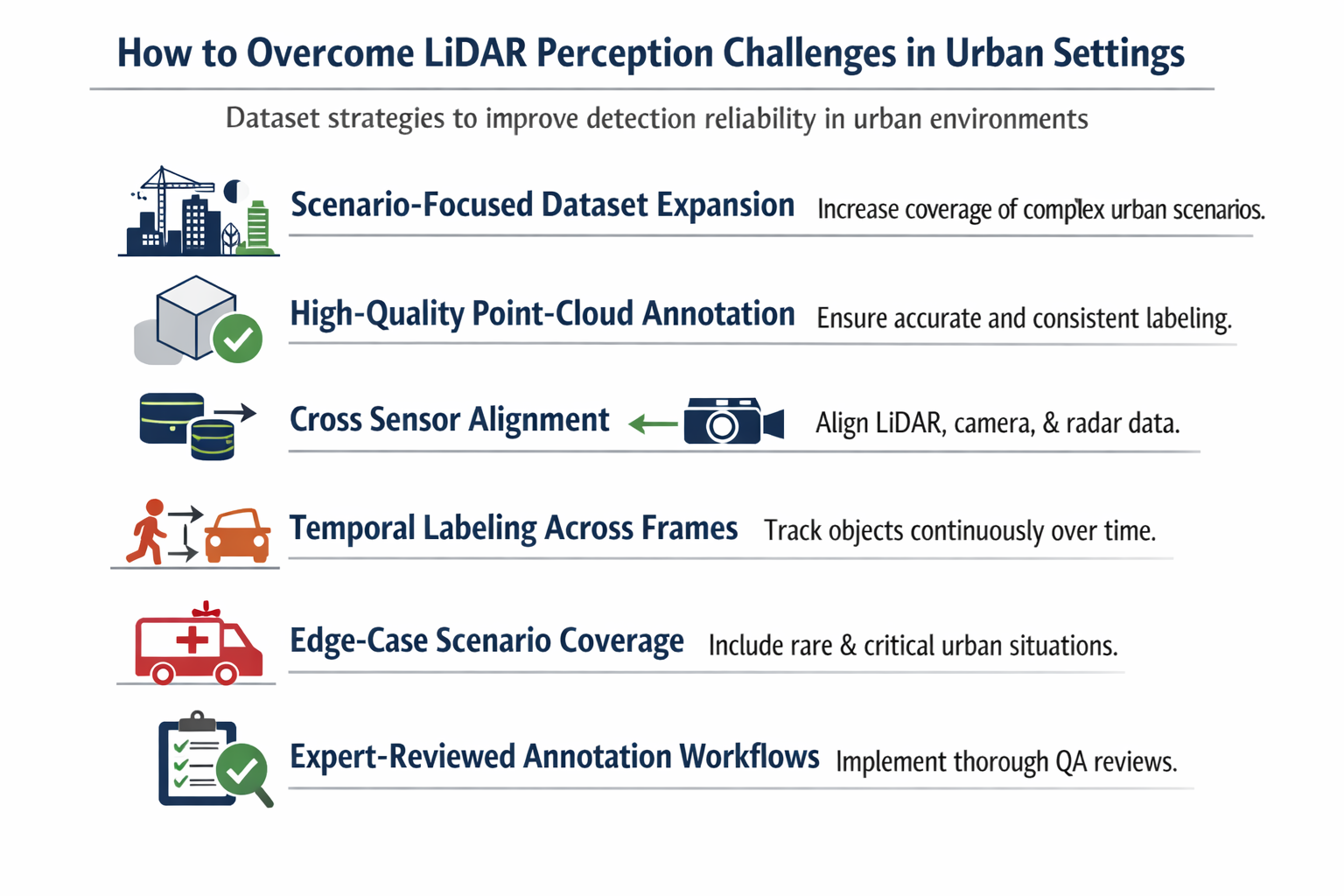
시나리오 중심 확장, 고품질 포인트 클라우드 어노테이션, 교차 센서 정렬 등 본문에서 제안하는 핵심 해결 방안들을 구조화하여 보여줍니다. 각 전략이 데이터 신뢰성 향상에 어떻게 기여하는지 요약하고 있습니다.
도심 환경의 LiDAR 인식 과제를 해결하기 위한 6가지 데이터 전략을 나열한 인포그래픽입니다.
용어 해설
- LiDAR
- — 레이저 펄스를 발사하여 물체에 반사되어 돌아오는 시간을 측정함으로써 주변 환경을 3차원으로 인식하는 센서 기술입니다. 자율주행 시스템에서 객체 탐지와 위치 추정의 핵심 역할을 수행하며 정밀한 거리 정보를 제공합니다.
- Point Cloud
- — LiDAR 센서가 수집한 수많은 3차원 좌표 점들의 집합입니다. 각 점은 공간상의 위치 정보를 담고 있으며, 이 점들이 모여 물체의 형태와 구조를 시각화하여 AI 모델이 인식할 수 있게 합니다.
- Occlusion
- — 관찰 시야에서 한 물체가 다른 물체에 의해 가려져 보이지 않게 되는 현상입니다. 도심 환경에서는 대형 차량이 보행자를 가리는 등의 상황이 빈번하여 LiDAR 데이터의 불완전성을 초래합니다.
- Semantic Segmentation
- — 이미지나 포인트 클라우드의 각 픽셀 또는 점을 미리 정의된 클래스(차량, 도로, 보행자 등)로 분류하는 기법입니다. 객체의 경계를 정밀하게 구분하여 자율주행 모델의 환경 이해도를 높입니다.
- Edge Case
- — 일반적인 상황을 벗어나 드물게 발생하지만 시스템에 치명적인 영향을 줄 수 있는 예외적인 시나리오입니다. 자율주행에서는 갑작스러운 보행자 돌출이나 특수 차량의 등장 등이 해당됩니다.
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.