핵심 요약
NVIDIA는 물리적 AI(Physical AI) 개발의 전 과정을 지원하는 새로운 오픈 소스 모델과 프레임워크 스택을 공개했다. 이 스택은 OpenUSD를 표준 프레임워크로 채택하여 고정밀 시뮬레이션, 합성 데이터 생성, 클라우드 오케스트레이션 및 엣지 배포를 통합한다. CES 2026에서는 Caterpillar, LEM Surgical, NEURA Robotics 등 다양한 기업들이 이 기술을 활용해 중장비 어시스턴트, 수술 로봇, 휴머노이드 등을 선보였다. 결과적으로 개발자들은 실제 환경에서 추론하고 학습하며 행동할 수 있는 자율 시스템을 더 빠르고 안전하게 구축할 수 있게 되었다.
배경
로보틱스 기본 지식, OpenUSD 개념, 강화학습(Reinforcement Learning) 기초
대상 독자
로보틱스 개발자, 물리적 AI 연구원, 자율 주행 시스템 엔지니어
의미 / 영향
NVIDIA의 통합 스택은 로보틱스 개발의 진입 장벽을 낮추고, 시뮬레이션 기반 학습(Sim-to-Real)의 신뢰성을 높여 다양한 산업 분야에서 물리적 AI의 상용화를 가속화할 것이다.
섹션별 상세
이미지 분석

기사에서 언급된 LEM Surgical의 실제 하드웨어 구현 사례를 보여준다. Jetson AGX Thor와 Isaac 기술이 적용된 척추 수술용 로봇의 외형과 수술실 환경에서의 구성을 확인할 수 있다.
LEM Surgical의 Dynamis 로봇 수술 시스템 전시 모습이다.
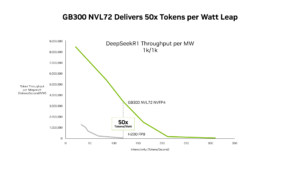
에이전트 AI를 위한 추론 성능이 기존 대비 최대 50배 향상되고 비용은 35배 절감됨을 수치로 증명한다. 물리적 AI 구동에 필수적인 컴퓨팅 효율성을 시각적으로 뒷받침한다.
NVIDIA Blackwell Ultra의 성능 향상을 보여주는 벤치마크 차트이다.
실무 Takeaway
- OpenUSD를 3D 데이터 표준으로 채택하여 시뮬레이션과 실제 배포 간의 데이터 호환성을 확보해야 한다.
- Cosmos 세계 모델(Predict/Reason)을 활용하면 로봇이 물리적 법칙과 사회적 맥락을 이해하는 능력을 획기적으로 개선할 수 있다.
- Isaac Lab-Arena와 같은 오픈 소스 프레임워크를 통해 가상 환경에서 로봇 정책을 검증함으로써 실제 환경 배포 리스크를 최소화할 수 있다.
AI 요약 · 북마크 · 개인 피드 설정 — 무료