이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
핵심 요약
카메라 제어 자동화는 컴퓨터 비전 모델이 영상 프레임을 분석하여 피사체의 위치를 파악하고, 이를 바탕으로 카메라의 이동 명령을 생성하는 과정이다. 이 시스템은 카메라가 캡처한 영상에서 피사체를 탐지하고, 프레임 중심과의 오차를 계산하여 카메라를 이동시키는 제어 루프를 지속적으로 수행한다. 본 아티클은 USB 웹캠과 아두이노, 서보 모터를 활용해 피사체를 추적하는 단일 축 카메라 시스템 구축 과정을 다룬다. 실제 구현에서는 구역 기반 제어 로직과 부드러운 움직임을 위한 이징 함수를 적용하여 안정적인 추적 성능을 확보한다.
배경
Python 기초, 아두이노 기본 회로 구성 지식, 컴퓨터 비전 및 객체 탐지 기초 개념
대상 독자
컴퓨터 비전을 활용한 로봇 제어 및 자동화 시스템에 관심 있는 개발자
의미 / 영향
컴퓨터 비전 기반의 자동 카메라 제어 기술은 방송 및 보안 분야에서 수동 운영 비용을 획기적으로 절감할 수 있다. 특히 소규모 하드웨어와 결합하여 실시간 추적 시스템을 구축함으로써, 전문 방송 장비 없이도 자동화된 영상 캡처 환경을 구현할 수 있다.
섹션별 상세
카메라 제어 루프는 매 프레임마다 피사체의 위치를 프레임 중심과 비교하여 팬, 틸트, 줌 등의 이동 결정을 내리는 방식으로 작동한다. 이 과정은 수동 개입 없이 피사체를 프레임 중앙에 유지하며, 방송이나 강의 녹화 등 다양한 환경에서 활용된다.
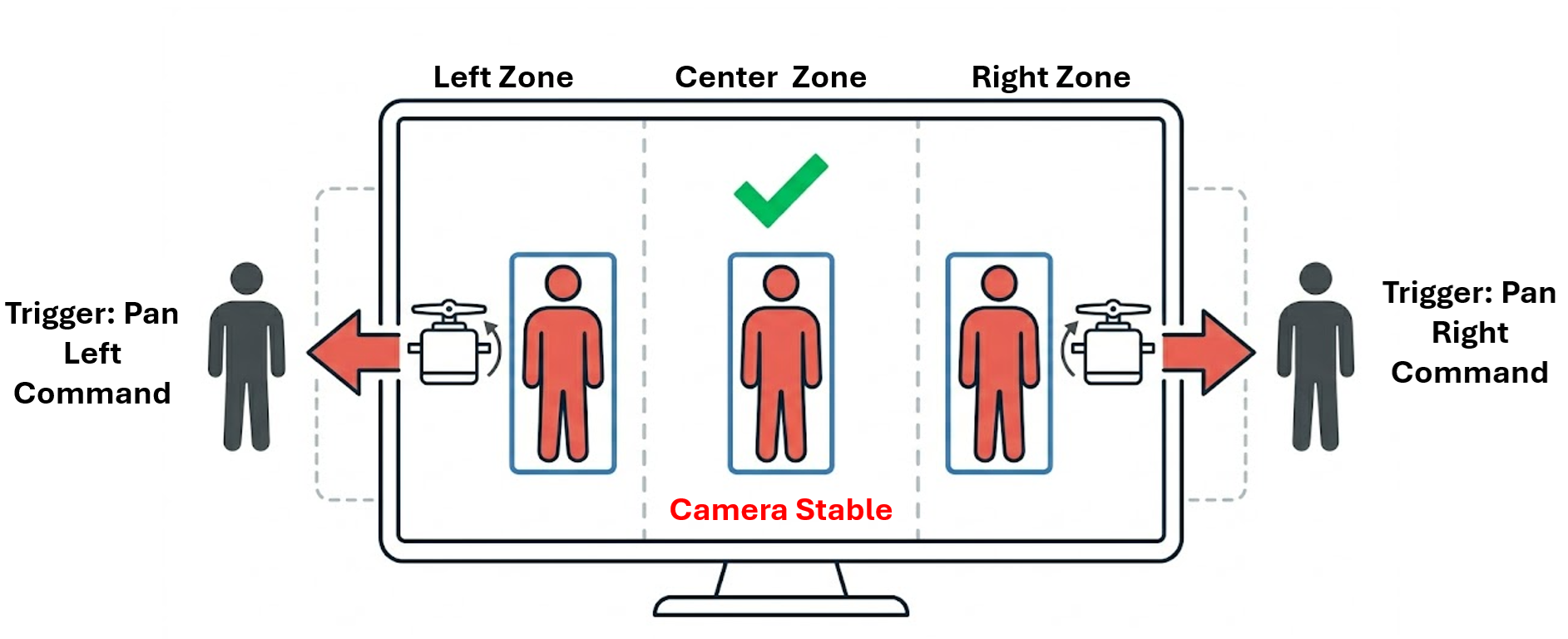
시스템은 프레임을 왼쪽, 중앙, 오른쪽의 세 구역으로 나누어 피사체가 중앙 구역을 벗어날 때만 카메라를 이동시킨다. 이러한 구역 기반 접근 방식은 불필요한 미세 조정을 방지하여 시스템의 안정성을 높이고 제어 명령의 빈도를 줄인다.
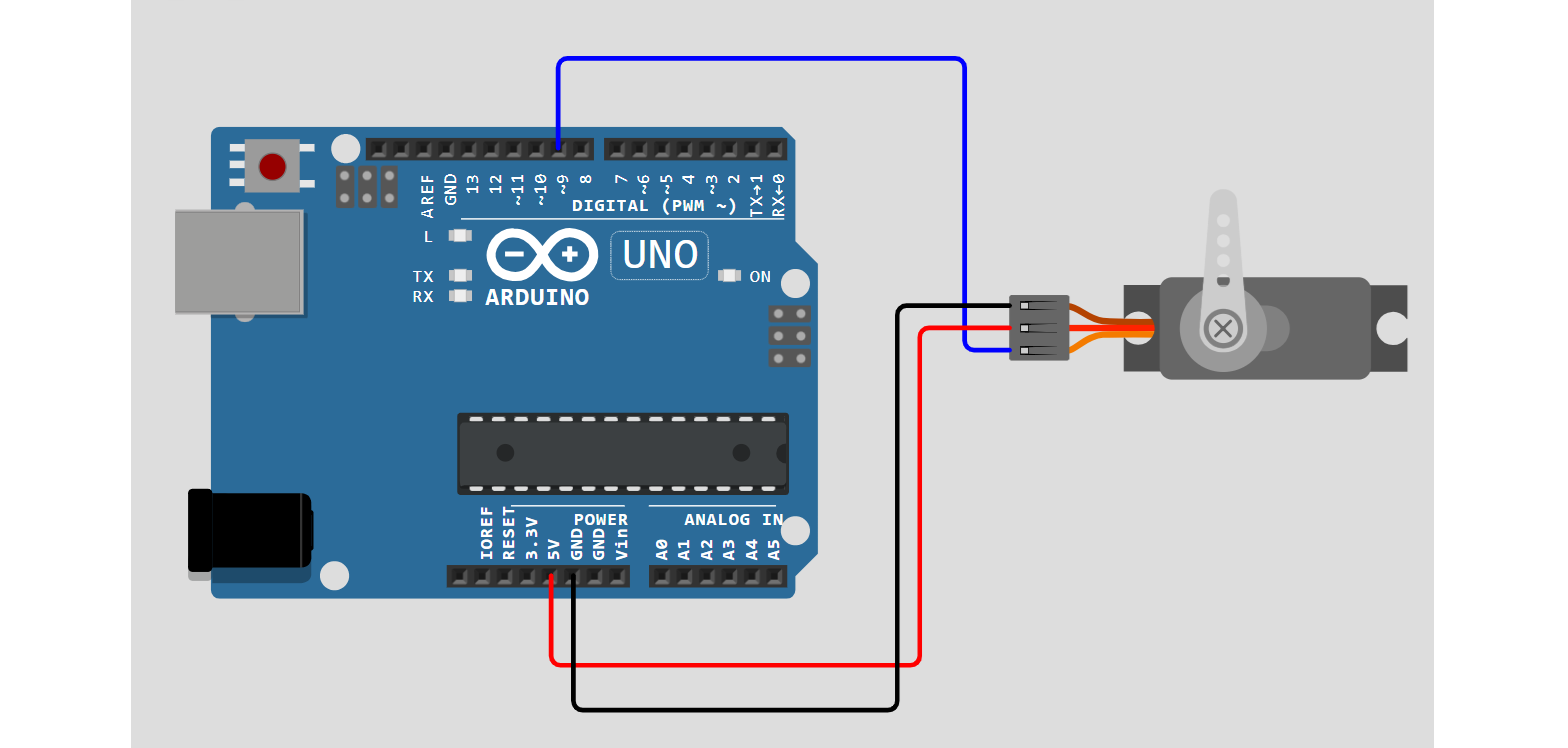
아두이노는 파이썬 스크립트로부터 시리얼 명령을 받아 서보 모터를 구동하며, 이때 smootherstep 이징 함수를 사용하여 급격한 움직임 대신 자연스러운 가속과 감속을 구현한다. 이를 통해 하드웨어의 물리적 한계를 보완하고 부드러운 영상 촬영이 가능해진다.
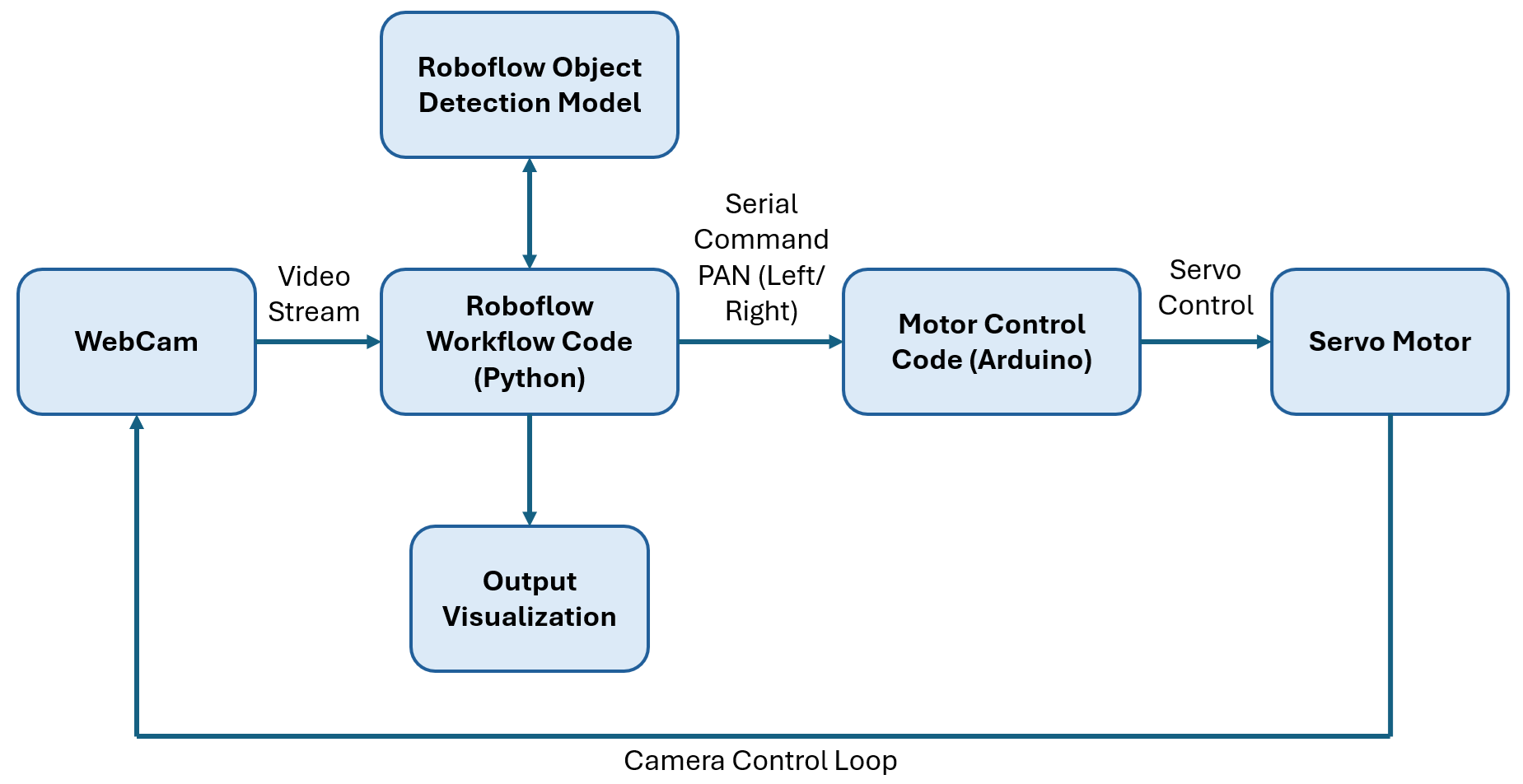
Roboflow Workflow의 RF-DETR 모델을 사용하여 실시간으로 피사체를 탐지하고, 탐지된 바운딩 박스의 중심 좌표를 기반으로 카메라 이동 명령을 생성한다. 이 파이프라인은 WebRTC를 통해 지연 시간을 최소화하며, 실시간 피사체 추적을 위한 핵심적인 제어 데이터를 제공한다.
실무 Takeaway
- 카메라 제어 시스템 구축 시 프레임을 구역으로 나누어 처리하면 불필요한 지터(jitter)를 방지하고 제어 효율을 높일 수 있다.
- 서보 모터 제어 시 선형 이동 대신 smootherstep과 같은 이징 함수를 적용하면 카메라 움직임이 훨씬 자연스럽고 안정적으로 변한다.
- 실시간 추적 시스템에서는 피사체 탐지 모델의 예측값과 프레임 중심 간의 오차를 계산하여 이를 0으로 수렴시키는 제어 루프를 구성하는 것이 핵심이다.
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 04. 21.수집 2026. 04. 21.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.