이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
핵심 요약
이 튜토리얼은 테니스 경기 영상에서 선수의 위치와 움직임을 분석하는 자동화 시스템 구축 과정을 다룹니다. Roboflow의 RF-DETR 모델을 사용하여 선수와 공을 실시간으로 탐지하고, 탐지된 바운딩 박스 정보를 GPT-5.1 Vision Language Model에 전달하여 전술적 해석을 도출합니다. RF-DETR Small 모델을 통해 mAP@50 59.9%의 성능을 확보했으며, 이를 Roboflow Workflows로 통합하여 최종적으로 주석과 AI 코멘터리가 포함된 분석 이미지를 생성합니다. 이 시스템은 고가의 장비 없이도 코치와 선수들에게 데이터 기반의 전술적 피드백을 제공할 수 있는 실무적 대안을 제시합니다.
배경
Python 기초 지식, Roboflow 플랫폼 사용법, 객체 탐지(Object Detection) 및 VLM에 대한 기본 개념
대상 독자
스포츠 분석 시스템을 구축하려는 AI 엔지니어 및 컴퓨터 비전 개발자
의미 / 영향
이 접근법은 고가의 전문 분석 장비 없이도 일반적인 경기 영상만으로 수준 높은 전술 데이터를 추출할 수 있게 합니다. 특히 소규모 팀이나 아마추어 수준에서도 AI 기반의 객관적인 퍼포먼스 분석 도구를 도입할 수 있는 기술적 토대를 마련해 줍니다.
섹션별 상세
테니스 경기 분석을 위해 Roboflow Universe의 데이터셋을 활용하여 RF-DETR 모델을 학습시킵니다. 85개의 이미지로 구성된 데이터셋을 70/15/15 비율로 분할하여 선수(person)와 테니스공(tennis) 클래스를 학습하도록 설정합니다. RF-DETR은 실시간 추론 속도를 유지하면서도 높은 정확도를 제공하는 최신 객체 탐지 아키텍처입니다.
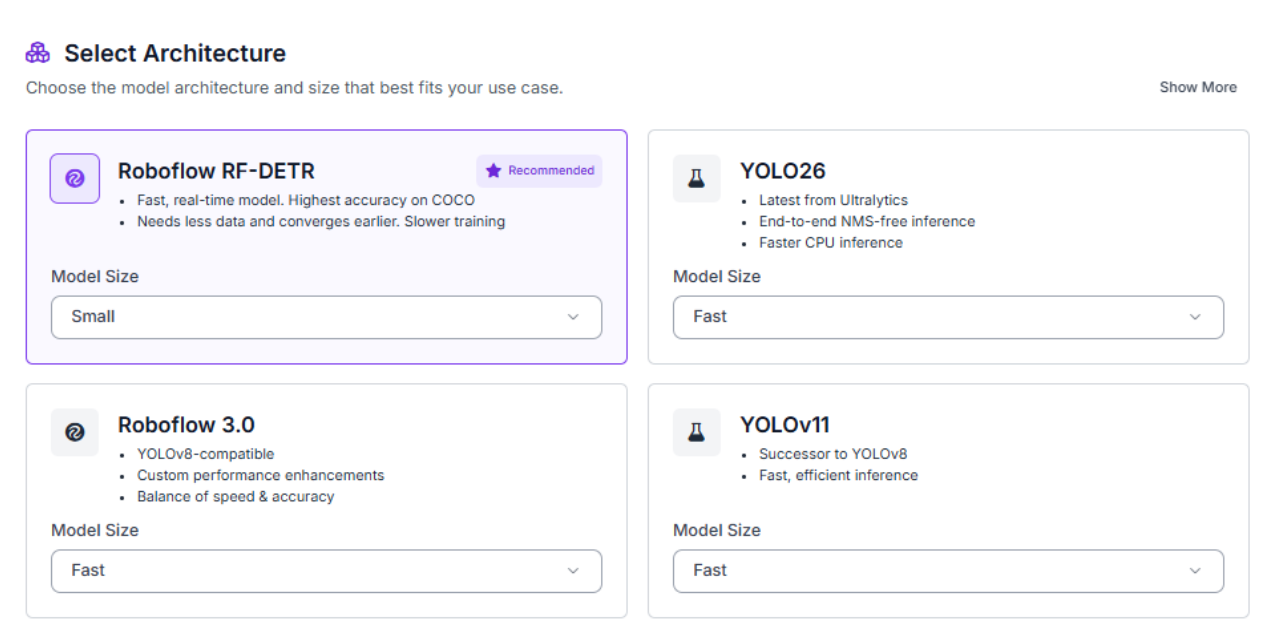
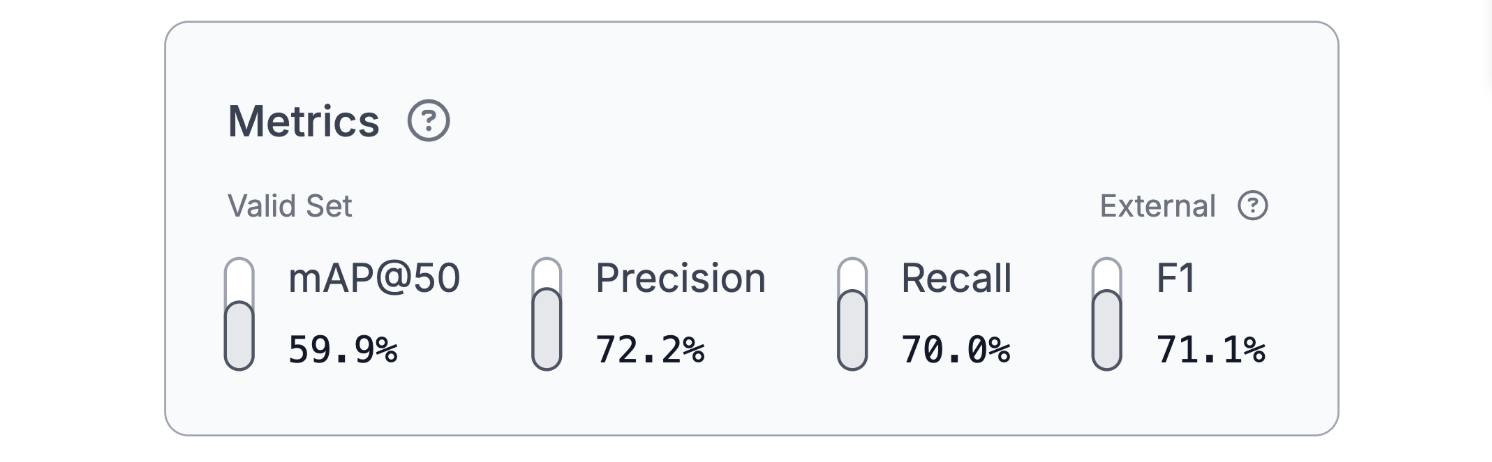
학습된 RF-DETR Small 모델은 mAP@50 기준 59.9%, Precision 72.2%, Recall 70.0%의 성능을 기록했습니다. 특히 크기가 작고 속도가 빠른 테니스공 탐지라는 어려운 과제에서도 균형 잡힌 F1 스코어(71.1%)를 보여주며 안정적인 탐지 능력을 입증했습니다. 이러한 성능 수치는 후속 전술 분석을 위한 신뢰할 수 있는 기초 데이터를 제공합니다.
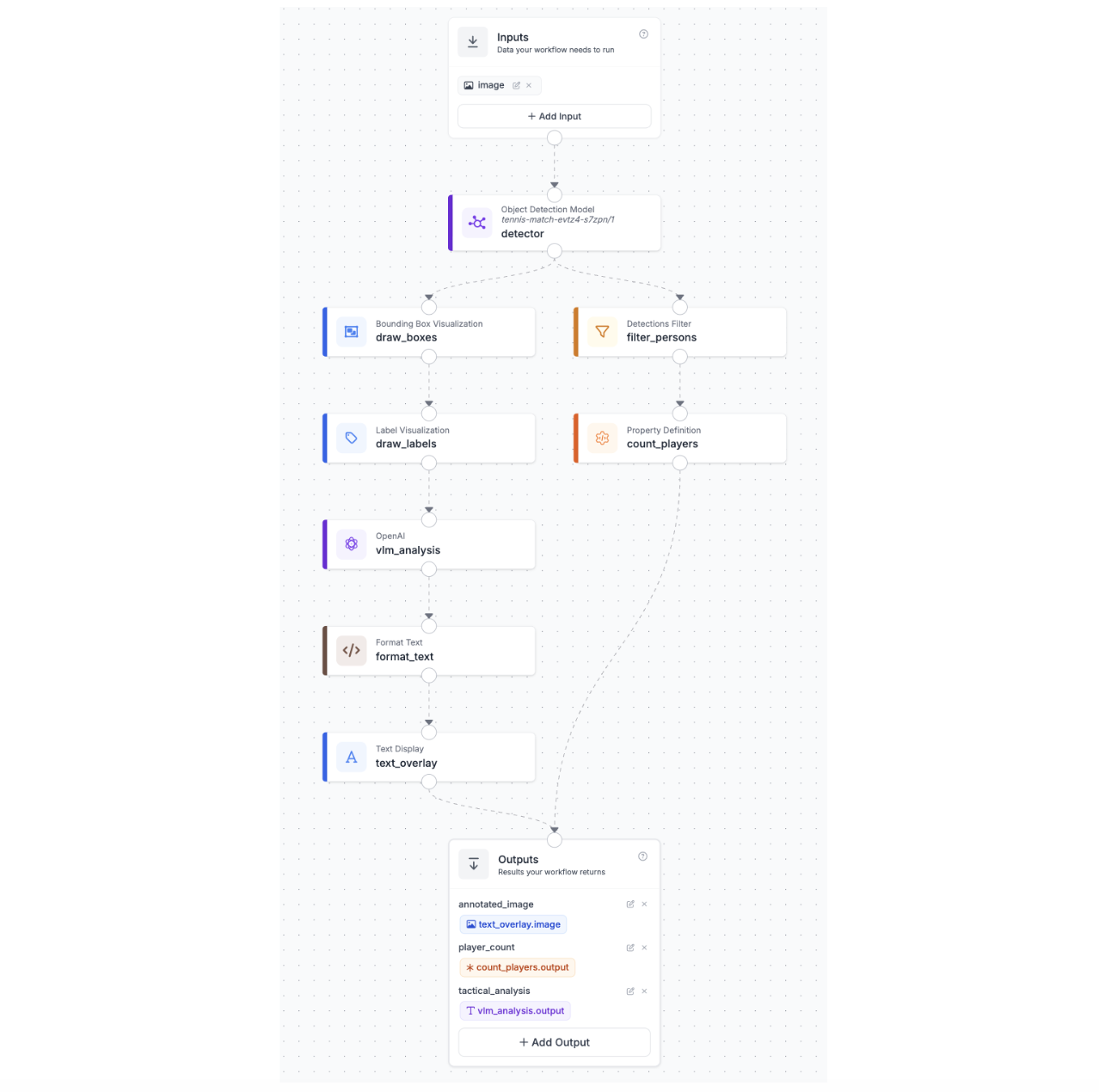
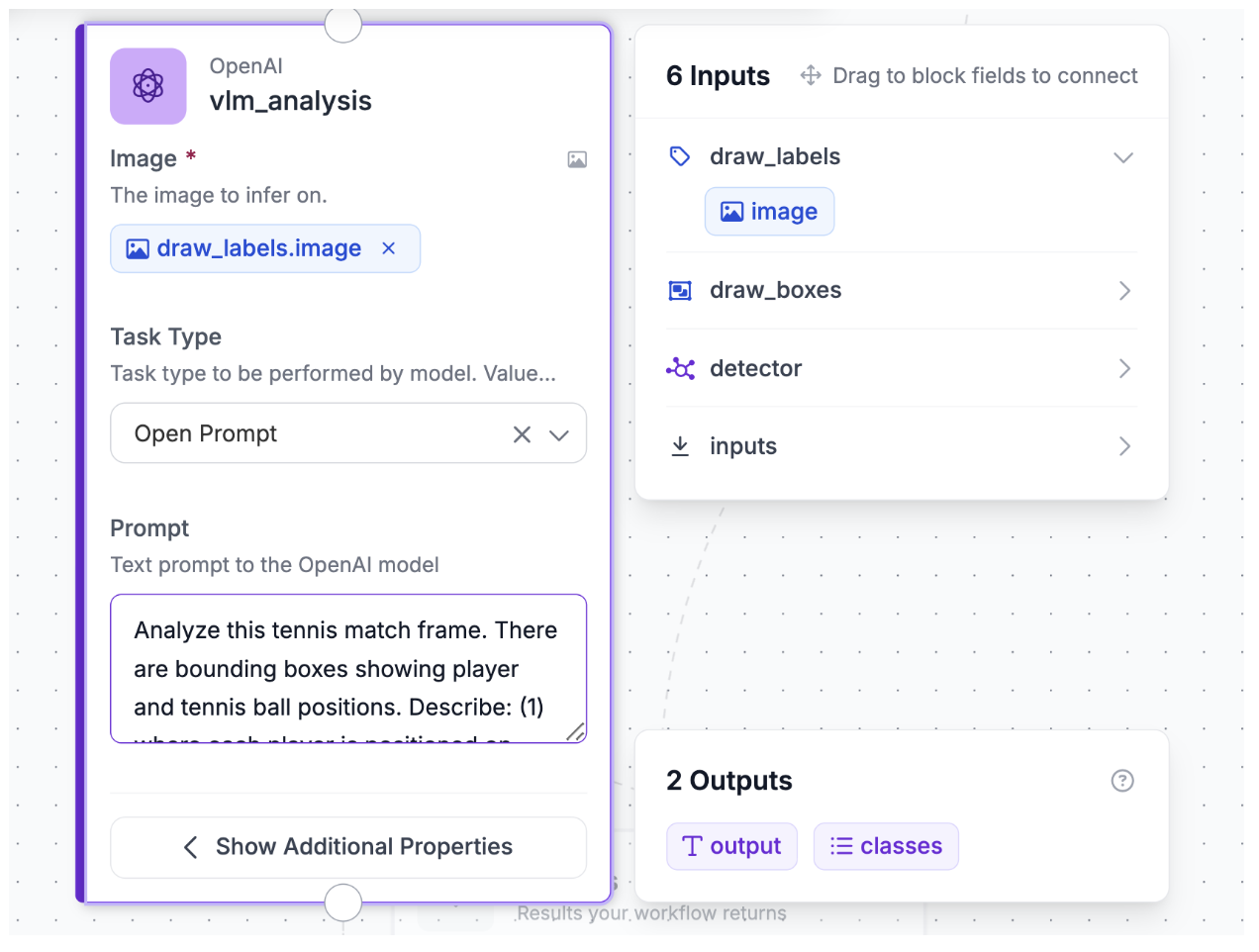
Roboflow Workflows를 통해 탐지 모델과 VLM을 연결하는 8단계 파이프라인을 구성합니다. RF-DETR이 생성한 바운딩 박스와 라벨이 포함된 이미지를 GPT-5.1 VLM 블록에 입력으로 전달합니다. VLM은 원본 픽셀 대신 탐지 결과가 주석으로 달린 이미지를 수신함으로써 위치 파악의 정확도를 높이고 전술적 추론에 집중할 수 있습니다.
GPT-5.1 VLM은 프롬프트에 따라 선수의 코트 위치(네트, 베이스라인 등)와 전술적 배치를 2-3문장으로 요약합니다. Temperature를 0.3으로 설정하여 추측성 서술을 배제하고 관찰 가능한 패턴에만 집중하도록 제어합니다. 이를 통해 '베이스라인 근처의 수비적 형성'과 같은 구체적인 코칭 인사이트를 텍스트로 출력합니다.
분석 결과를 시각화하기 위해 커스텀 Python 블록과 텍스트 오버레이 블록을 사용합니다. Python 블록은 VLM의 긴 텍스트 출력을 90자 단위로 줄바꿈하여 이미지 내 가독성을 확보합니다. 최종적으로 주석이 달린 경기 프레임 하단에 AI가 생성한 전술 코멘터리가 합성되어 한눈에 확인 가능한 분석 리포트가 완성됩니다.
실무 Takeaway
- 객체 탐지 모델(RF-DETR)로 위치를 먼저 확정하고 VLM(GPT-5.1)으로 추론하는 'Detect-then-Reason' 패턴을 적용하면 VLM의 환각 현상을 줄이고 분석 정확도를 높일 수 있습니다.
- Roboflow Workflows의 커스텀 Python 블록을 활용하여 VLM의 출력을 전처리함으로써 분석 리포트의 시각적 품질과 가독성을 프로덕션 수준으로 개선할 수 있습니다.
- RF-DETR Small 모델은 30-45분 내외의 짧은 학습 시간으로도 테니스공과 같은 미세 객체에 대해 70% 이상의 Precision을 확보할 수 있어 실시간 스포츠 분석에 적합합니다.
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 05. 07.수집 2026. 05. 07.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.