핵심 요약
자동차 제조의 핵심인 차체(Body-in-White) 단계에서 발생하는 미세한 결함은 막대한 리콜 비용을 초래할 수 있는 심각한 문제이다. 본 가이드는 RF-DETR 모델을 통한 고속 지각 계층과 Gemini 3.1 Pro를 활용한 정밀 추론 계층을 결합한 2단계 자동 검사 시스템 구축법을 상세히 설명한다. Roboflow 플랫폼을 기반으로 데이터셋 준비부터 모델 학습, 워크플로 자동화까지의 전 과정을 다루며, 제조 현장의 실시간 요구사항과 비용 효율성을 동시에 충족하는 최적의 AI 아키텍처를 제안한다.
배경
컴퓨터 비전 및 객체 탐지(Object Detection) 기본 지식, Roboflow 플랫폼 사용 경험, VLM(Vision Language Model) API 활용 능력, 엣지 컴퓨팅 하드웨어에 대한 이해
대상 독자
자동차 제조 및 스마트 팩토리 솔루션 개발자, 컴퓨터 비전 엔지니어, 품질 관리 시스템 설계자
의미 / 영향
이 시스템은 수동 검사의 한계를 극복하고 제조 공정 초기에 결함을 차단함으로써 대규모 리콜 위험을 획기적으로 줄일 수 있다. 특히 고속 탐지 모델과 고지능 추론 모델의 하이브리드 구성은 산업용 AI의 비용 대비 성능 최적화를 위한 표준 모델이 될 것으로 기대된다.
섹션별 상세
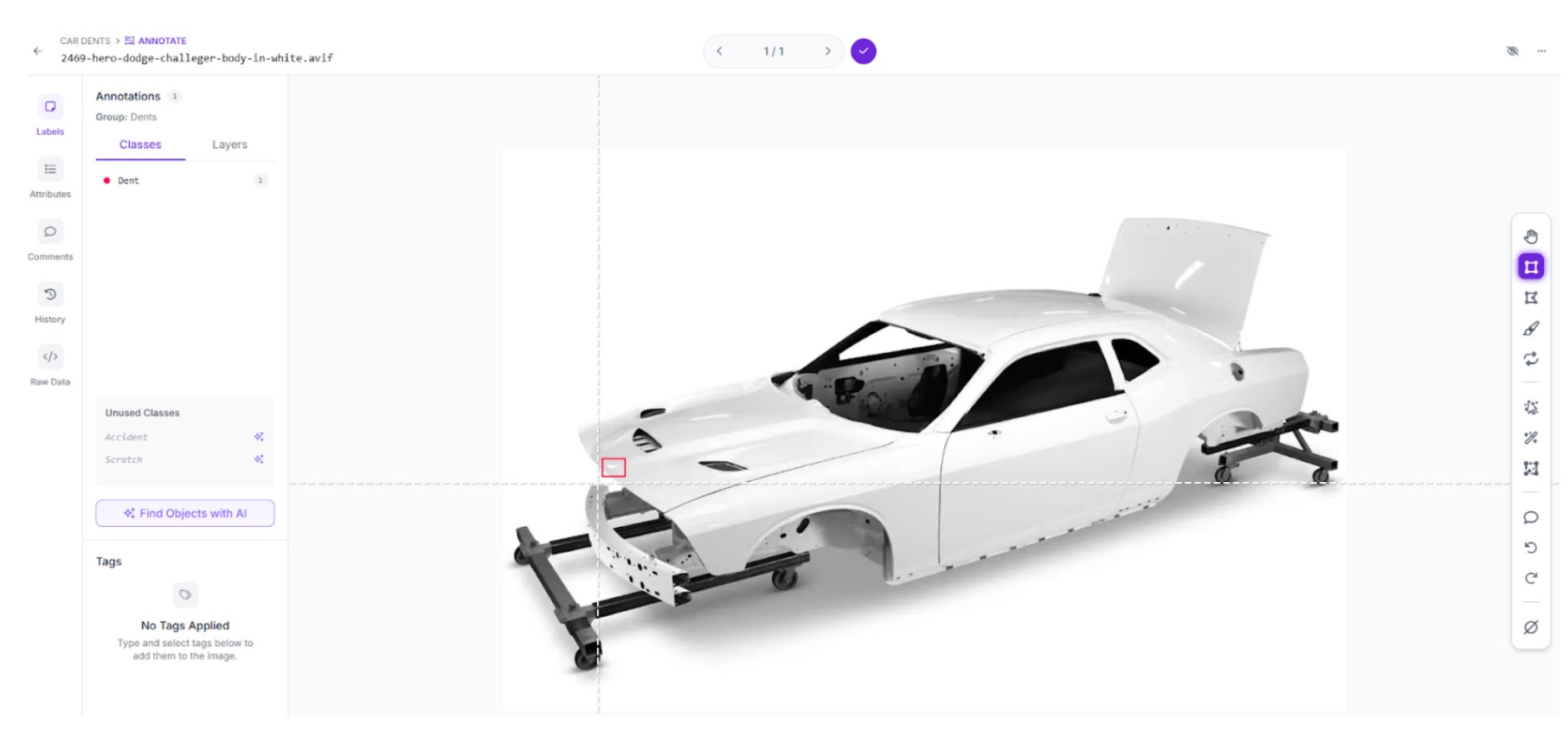
자동차 제조의 BiW 단계는 용접된 금속 부품의 품질을 결정하는 가장 중요한 창구이며, 기존의 수동 검사는 피로도로 인한 오류 가능성이 높다. 이를 해결하기 위해 AI 기반의 '표면 가디언(Surface Guardian)' 시스템을 도입하여 24시간 자동 품질 게이트를 운영함으로써 구조적 불일치를 사전에 차단한다.
검사 시스템은 지각 계층(Perception Layer)과 추론 계층(Reasoning Layer)으로 역할을 분담한다. 1단계에서는 RF-DETR 모델이 차체를 스캔하여 결함 후보지를 빠르게 식별하고, 2단계에서는 Gemini 3.1 Pro 비전 에이전트가 금속의 질감을 정밀 분석하여 실제 결함 여부와 심각도를 최종 판단한다.
RF-DETR Small 모델은 60 mAP를 돌파한 트랜스포머 기반 아키텍처로, 제조 라인의 빠른 속도에 맞춘 저지연 추론과 NVIDIA Jetson 같은 엣지 디바이스에서의 실행에 최적화되어 있다. 이 모델은 완벽한 판단보다는 관심 영역을 빠르게 걸러내는 트리야지(Triage) 역할을 수행하여 시스템 전체의 효율을 높인다.
데이터 준비 과정에서는 70/20/10 비율의 학습/검증/테스트 분할을 권장하며, 특히 제조 현장의 가혹한 환경을 모방하기 위해 모션 블러(Motion Blur), 전단(Shear), 노출 변동 등의 증강(Augmentation) 기법을 적용한다. 특히 100px 수준의 모션 블러는 고속 이동 중인 차체 인식을 위한 핵심 설정이다.
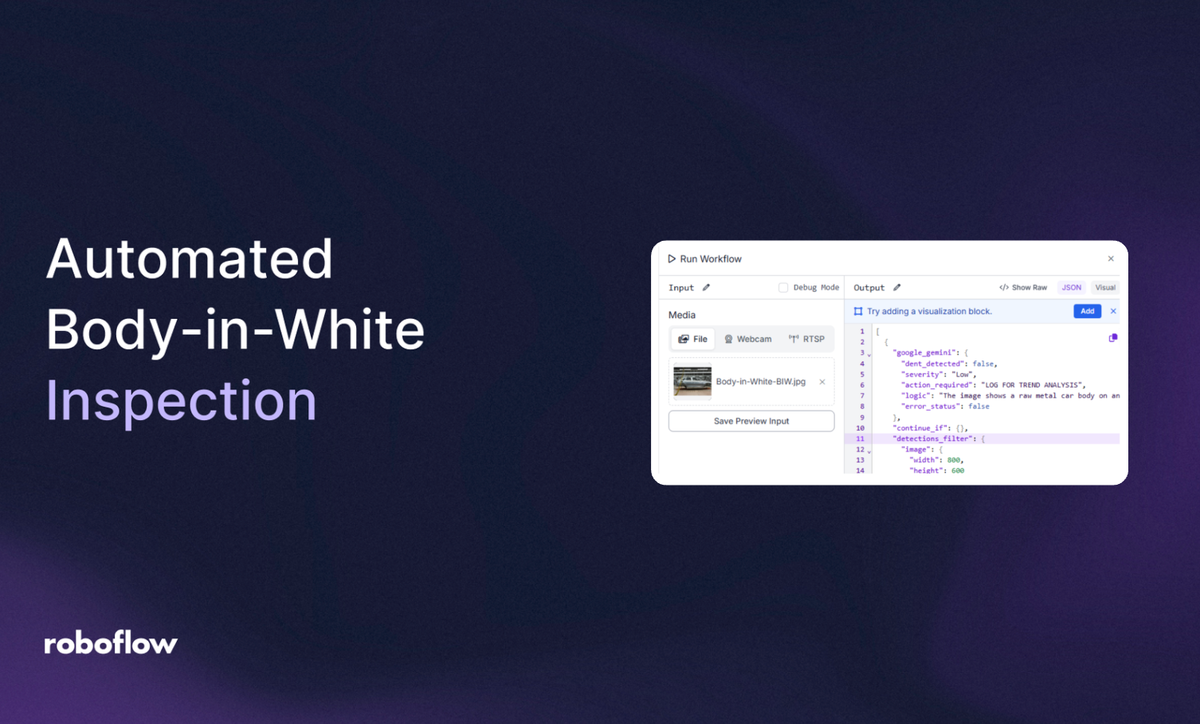
Roboflow Workflows를 통해 구축된 논리 구조는 'Continue If' 게이트를 사용하여 1단계 탐지 모델의 확신도가 낮을 때만 비용이 높은 VLM(Gemini)을 호출하도록 설계되었다. 최종 출력은 JSON 형태로 구조화되어 즉각적인 라인 중단(Line Stop)이나 수동 검사 요청 등의 구체적인 공장 운영 액션으로 연결된다.
실무 Takeaway
- RF-DETR Small 모델을 사용하여 제조 라인의 병목 현상 없이 밀리초 단위의 고속 결함 탐지 시스템을 구축할 수 있다.
- 비용 효율적인 운영을 위해 모든 이미지를 VLM에 보내는 대신, 탐지 모델의 신뢰도 임계값(예: 80% 미만)에 따라 조건부로 추론 에이전트를 활성화하는 워크플로를 설계해야 한다.
- 제조 현장의 특수성을 반영하여 100px 수준의 모션 블러 증강을 적용함으로써 고속으로 이동하는 차체에서도 정확한 결함 인식이 가능하도록 모델의 강건성을 확보한다.
언급된 리소스
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료