TL;DR
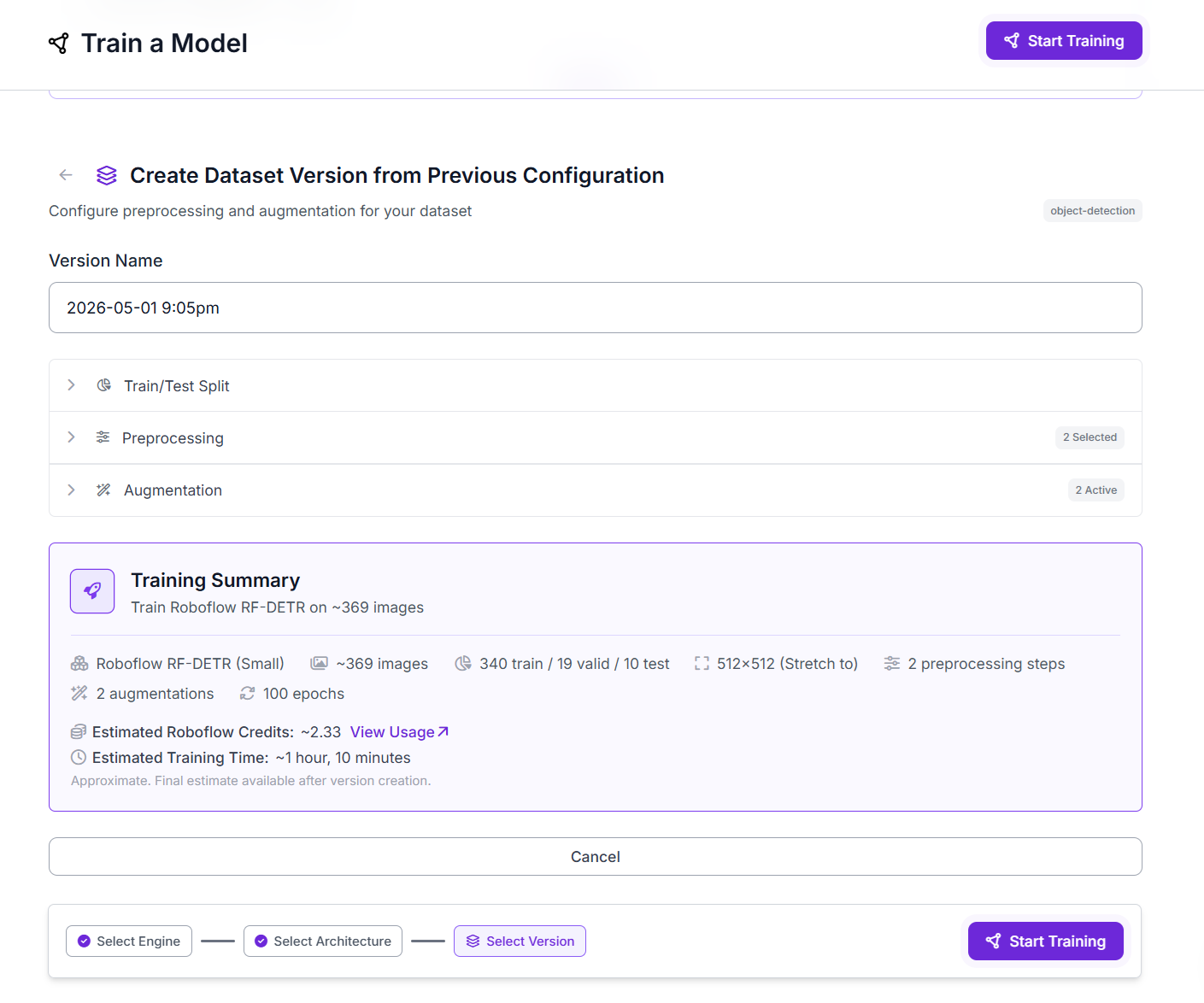
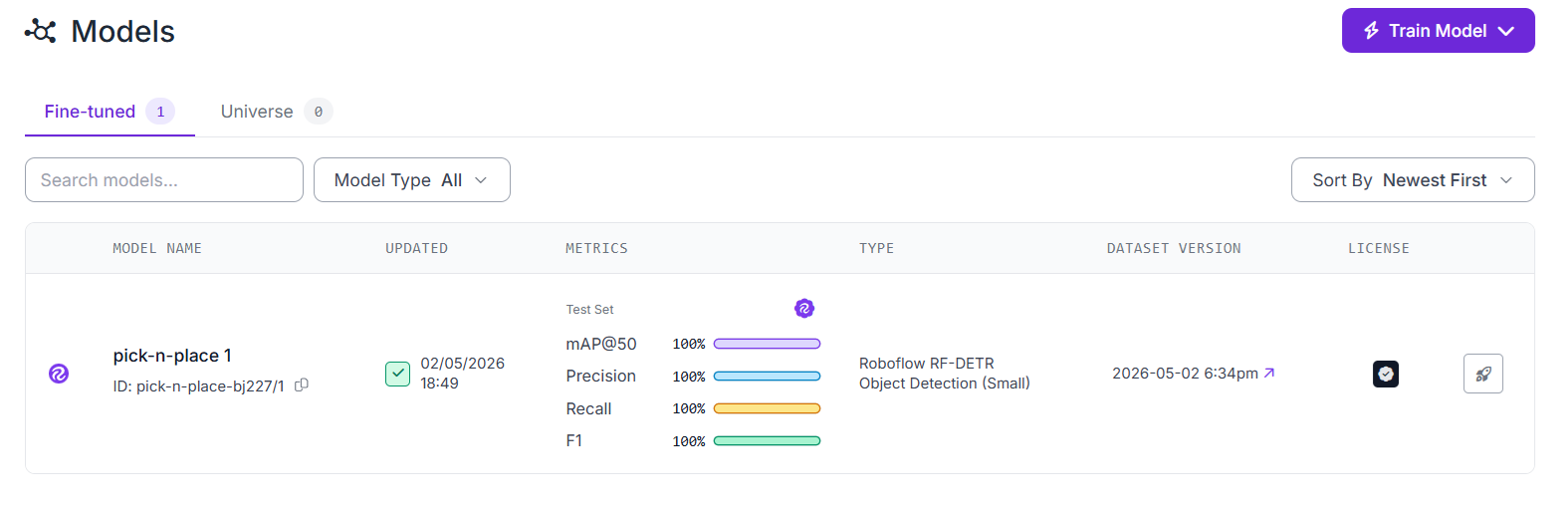
비전 가이드 픽 앤 플레이스 시스템은 카메라와 컴퓨터 비전 모델을 사용하여 물체를 식별하고 물리적으로 이동시키는 로봇 기술이다. 본 아티클은 KUKA IIWA 로봇 암과 Roboflow RF-DETR 모델을 활용하여 시뮬레이션 환경에서 작동하는 두 가지 카메라 구성(Eye-to-Hand, Eye-in-Hand) 프로토타입을 구축하는 방법을 제시한다. 전체 프로세스는 합성 데이터 생성, 모델 학습, 좌표 변환, 그리고 역기구학을 이용한 로봇 제어 단계로 구성된다. 특히 시뮬레이션 내에서 100장의 합성 이미지를 생성하고 학습시켜 실제 물리 법칙이 적용된 환경에서 높은 정확도의 물체 조작이 가능함을 입증했다. 이 가이드는 비전 모델의 신뢰성이 로봇 시스템 전체의 성능을 결정짓는 핵심 요소임을 강조한다.
배경
Python 3.10, PyBullet 시뮬레이션 라이브러리에 대한 기본 이해, 객체 검출(Object Detection) 모델 학습 개념, 기초적인 로봇 기구학 지식
대상 독자
로봇 공학 및 컴퓨터 비전을 결합하여 자동화 시스템을 구축하려는 AI 엔지니어 및 연구원
의미 / 영향
이 기술은 실제 물리적 로봇 없이도 시뮬레이션만으로 고성능 비전 가이드 시스템을 설계하고 검증할 수 있음을 보여줍니다. 특히 합성 데이터와 RF-DETR 같은 효율적인 모델을 결합함으로써 개발 주기를 수개월에서 수일로 단축시켜 제조 및 물류 자동화의 진입 장벽을 낮출 것입니다.
섹션별 상세
cam_view = p.computeViewMatrix(
cameraEyePosition =[0.50, 0.00, 1.20],
cameraTargetPosition=[0.50, 0.00, 0.00],
cameraUpVector=[0, 1, 0])
cam_proj = p.computeProjectionMatrixFOV(
fov=55, aspect=CAM_W/CAM_H, nearVal=0.01, farVal=5.0)PyBullet 시뮬레이션 내에서 합성 데이터 생성을 위한 가상 카메라의 뷰 및 투영 행렬을 설정하는 코드
def capture_and_label(index, obj_info):
_, _, rgb, _, seg = p.getCameraImage(CAM_W, CAM_H, viewMatrix=cam_view, projectionMatrix=cam_proj, renderer=p.ER_TINY_RENDERER)
img = cv2.cvtColor(np.array(rgb, dtype=np.uint8).reshape(CAM_H, CAM_W, 4), cv2.COLOR_RGBA2BGR)
seg = np.array(seg).reshape(CAM_H, CAM_W)
cv2.imwrite(os.path.join(IMG_DIR, f"image_{index:04d}.jpg"), img)시뮬레이션 환경에서 이미지를 캡처하고 세그멘테이션 마스크를 기반으로 레이블을 생성하는 함수
def pixel_to_world(px, py):
x_min, x_max = 0.34, 0.66
y_min, y_max = -0.24, 0.24
nx = px / CAM_W
ny = py / CAM_H
wx = x_min + nx * (x_max - x_min)
wy = y_max - ny * (y_max - y_min)
return wx, wy검출된 픽셀 좌표를 고정된 카메라 시야 범위에 기반하여 실제 3D 월드 좌표(XY)로 변환하는 로직
실무 Takeaway
- 시뮬레이션 환경(PyBullet)에서 학습 카메라와 추론 카메라의 파라미터를 동일하게 설정하면 합성 데이터만으로도 높은 정확도의 로봇 제어 모델을 구축할 수 있다.
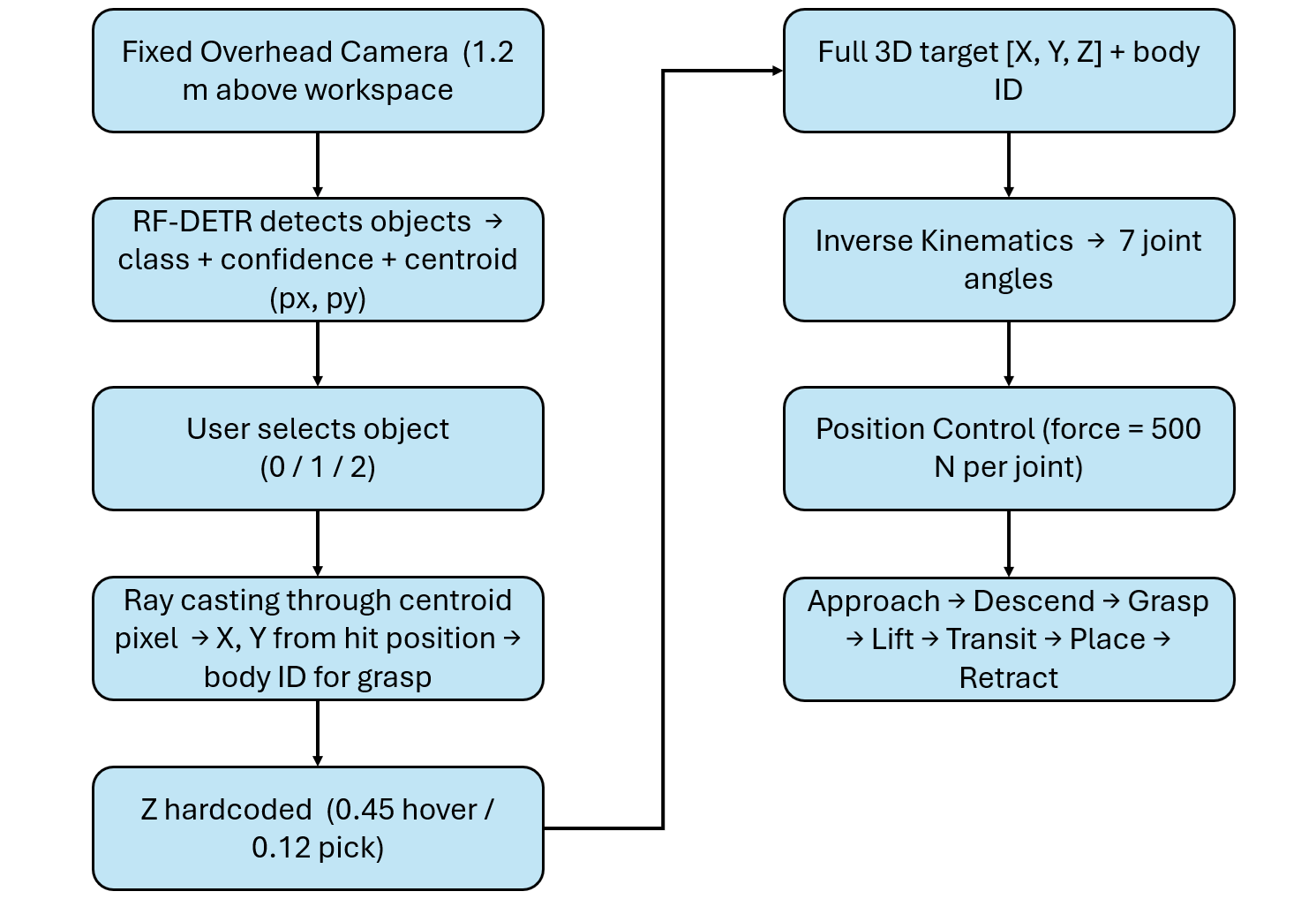
- 비전 모델의 출력인 2D 픽셀 좌표를 3D 월드 좌표로 변환하기 위해 레이 캐스팅(Ray Casting) 기법을 적용하면 물체의 정확한 파지 지점을 계산할 수 있다.
- 복잡한 환경에서는 Eye-in-Hand 구성을 선택하여 로봇이 스캔 포즈를 취하게 함으로써 가려짐 문제를 해결하고 정밀한 객체 인식을 수행할 수 있다.
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.