이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
TL;DR
도로 포트홀은 차량 파손과 안전 문제를 야기하지만 기존 수동 점검 방식은 효율이 낮다. RF-DETR 모델은 실시간 추론에 최적화된 아키텍처로 고속 주행 환경에서도 포트홀을 정확히 식별한다. Roboflow Workflows를 통해 탐지 모델, Byte Tracker, 데이터 분석 로직을 연결하여 포트홀 개수와 위험도를 실시간으로 시각화한다. 테스트 결과 mAP@50 80.0%, F1-Score 81.3%의 성능을 기록하며 도로 유지보수 자동화의 기반을 제공한다.
섹션별 상세
Roboflow Universe에서 다양한 도로 환경을 포함한 데이터셋을 확보하고, Roboflow Annotate로 포트홀 영역을 정밀하게 라벨링하여 모델 학습의 기초를 마련한다.
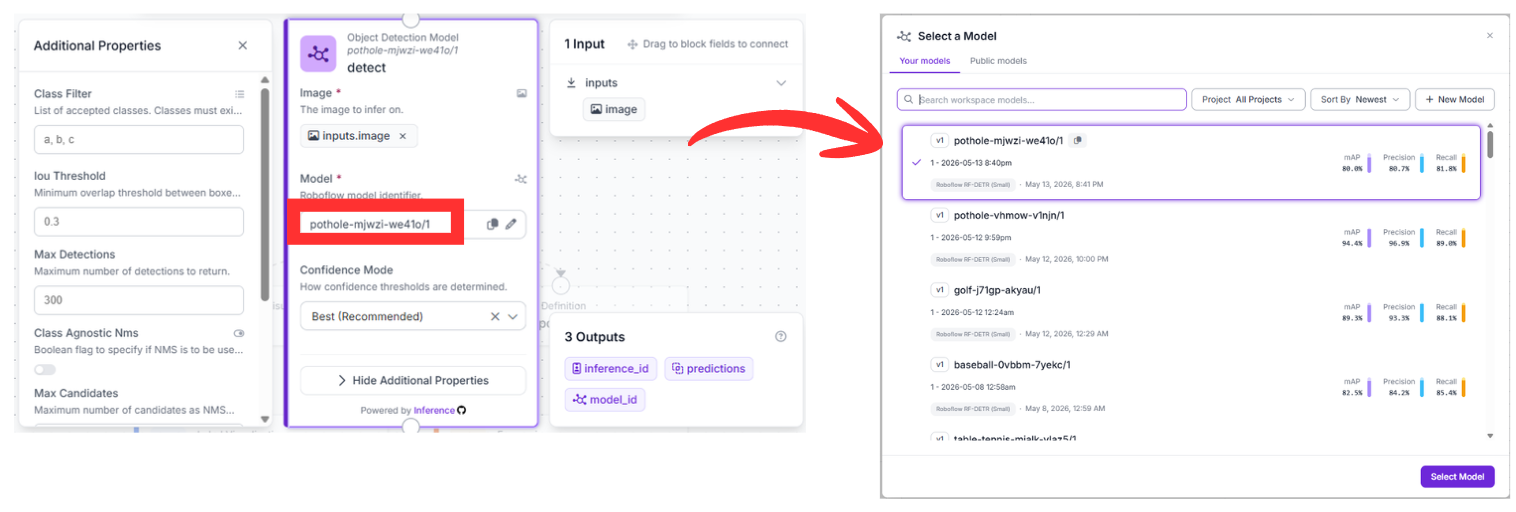
실시간 추론에 최적화된 RF-DETR 아키텍처를 선택하여 고속 주행 중에도 포트홀을 놓치지 않고 탐지한다.
512x512 해상도 표준화와 함께 채도, 밝기, 노출 조정을 통해 다양한 조명과 날씨 환경에서도 모델이 강건하게 작동하도록 학습 데이터를 구성한다.
단일 프레임 탐지의 한계를 극복하기 위해 Byte Tracker를 도입하여 동일 포트홀을 중복 카운트하지 않고 고유 ID를 부여해 지속적으로 추적한다.
Roboflow Workflows를 사용하여 탐지, 추적, 시각화, 위험도 분석 로직을 모듈형 블록으로 연결하여 실시간 모니터링 시스템을 완성한다.
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 05. 15.수집 2026. 05. 15.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.