이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
TL;DR
자율주행 시스템은 카메라의 시각적 정보와 LiDAR의 공간적 깊이 정보를 결합하여 환경을 인식한다. 센서 간 공간적 캘리브레이션과 시간적 동기화가 어긋나면 객체 탐지 오류와 인식 불안정이 발생한다. 데이터셋 준비 단계에서 정렬 검증을 통합하여 다중 모달 데이터의 일관성을 유지해야 한다. 정밀한 정렬은 복잡한 교통 상황이나 악천후 환경에서도 시스템의 인식 성능을 유지하는 핵심 요소이다.
대상 독자
자율주행 인식 시스템 개발자 및 데이터 엔지니어
의미 / 영향
센서 퓨전 정렬은 자율주행 시스템의 안전성과 직결되는 핵심 기술이다. 데이터셋 단계에서의 정렬 품질 관리는 모델의 인식 성능을 결정짓는 중요한 요소로 자리 잡고 있다.
섹션별 상세
카메라는 풍부한 시각적 맥락을 제공하고 LiDAR는 정밀한 깊이 정보를 제공하여 상호 보완한다. 두 센서를 결합하면 단일 센서의 한계를 극복하고 객체 탐지의 강건성을 높일 수 있다.

카메라와 LiDAR를 동일 좌표계로 맞추기 위해 외부 파라미터(extrinsic parameters)를 추정한다. 타겟 기반 방식이나 타겟 없는(targetless) 방식을 사용하여 센서 간 상대적 위치와 방향을 보정한다.
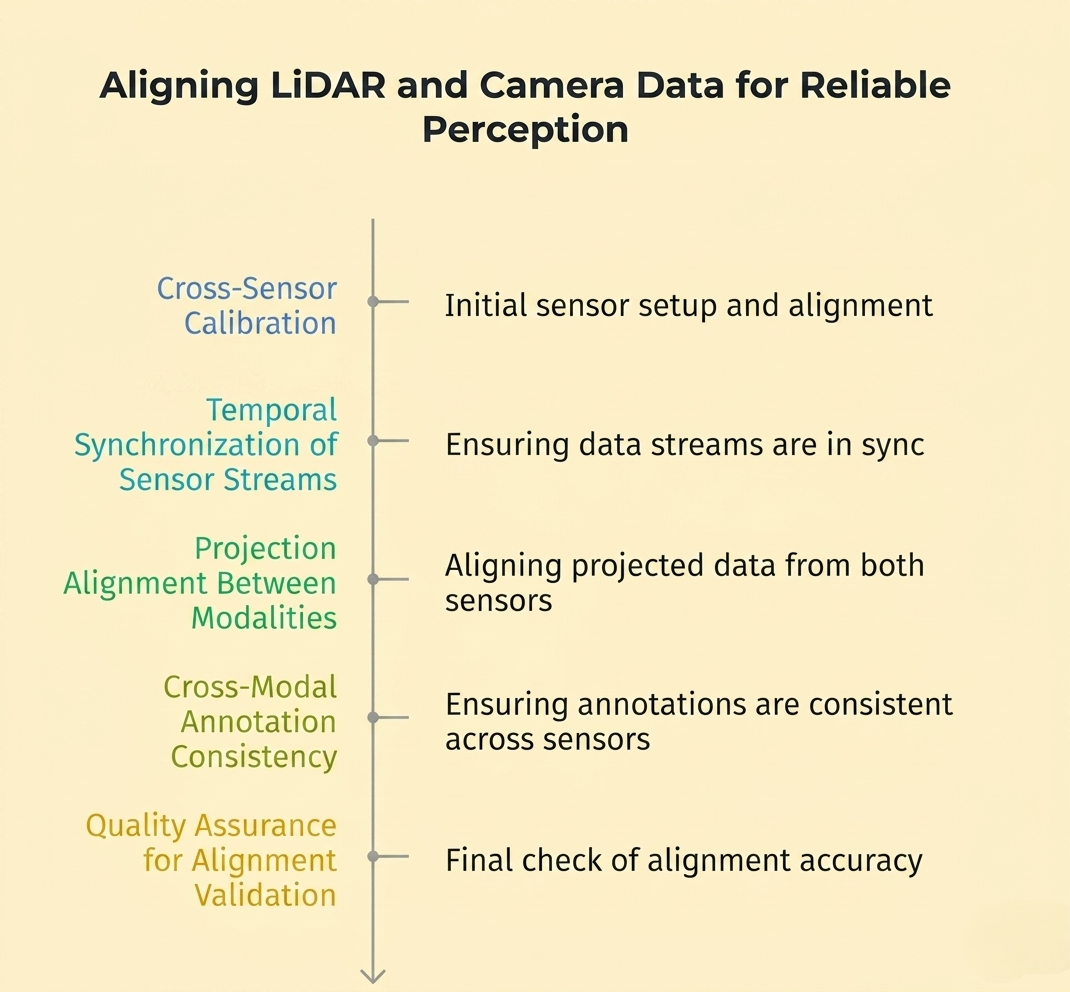
LiDAR와 카메라는 서로 다른 주기로 작동하므로 데이터 수집 시점을 일치시켜야 한다. 하드웨어 클록 공유나 소프트웨어 기반의 타임스탬프 보간을 통해 움직이는 객체의 위치 불일치를 방지한다.
3D LiDAR 포인트를 2D 이미지 평면에 투영하여 기하학적 정보와 시각적 정보를 연결한다. 정렬 오류는 객체 경계면이나 배경에서 즉각 드러나므로, 이를 지속적으로 검증하여 데이터셋의 품질을 확보한다.
2D 바운딩 박스와 3D 큐보이드가 서로 일치하도록 다중 모달 환경에서 동시에 주석을 수행한다. 가려짐(occlusion)이 있는 장면에서도 두 모달리티 간의 라벨 일관성을 유지하여 모델 학습 데이터의 신뢰도를 높인다.
기술
- LiDAR
- Camera
- Sensor Fusion
활용 사례
- 자율주행 인식
- 객체 탐지
- 데이터셋 구축
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 05. 23.수집 2026. 05. 23.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.