이 요약은 AI가 원문을 분석해 생성했습니다. 정확한 내용은 원문 기준으로 확인하세요.
TL;DR
넓은 경계 감시의 비용과 사각지대를 줄이기 위해 PTZ 카메라 두 대와 드론 한 대의 RTSP 스트림을 MediaMTX로 중계하고 2초마다 프레임을 샘플링해 RF-DETR로 사람·차량을 검출하는 시스템을 구축했다. FastAPI 워커가 샘플을 추출해 추론 서버에 POST하고 ByteTrack으로 객체를 추적하며 PolygonZone으로 제한구역 내 지속 침범을 확인하면 zone 로직이 자동으로 드론을 출동시키고 클립을 저장한다. 대시보드는 WebRTC로 라이브 영상을 표시하고 이벤트 로그와 드론 텔레메트리를 통합해 운영자가 상태를 모니터링할 수 있게 했으며, 이 설계는 프레임별 추론을 피해 비용과 추론 부하를 줄이는 대신 샘플링 주기·추적 정확도·모델 성능에 따른 트레이드오프가 존재한다.
섹션별 상세
고정식 보안 카메라는 설치 위치에 따라 사각지대를 만들며 넓은 경계를 커버하려면 다수의 카메라와 배선 또는 사람 순찰이 필요해 비용과 운영 부담이 발생한다. 드론은 하나의 기체로 넓은 호를 순찰하고 필요 시 착륙해 충전할 수 있어 하드웨어 수를 줄이는 대안이 된다. 하지만 드론 영상 자체는 유의미한 판단이 없으면 값비싼 관찰자에 불과하므로 자동화된 컴퓨터 비전이 관측 결과를 의미 있는 행동으로 연결하는 핵심이다.
시스템 동작은 카메라와 드론의 RTSP 스트림을 MediaMTX 중계기가 받아 WebRTC로 대시보드에 송출하고, 동일 중계 또는 워커가 2초 간격으로 프레임을 샘플링해 FastAPI 워커로 전달하는 데이터 플로우를 따른다. 워커는 샘플링한 프레임을 Roboflow 추론 서버의 RF-DETR 엔드포인트에 POST하고, 추론 결과는 zone/event 로직으로 전달되어 지속 침범을 확인하면 드론 출동·클립 저장·대시보드 이벤트를 발생시킨다. 이 구조는 브라우저의 RTSP 재생 한계를 우회하면서 실시간 모니터링과 간헐적 추론을 분리해 비용과 추론 부하를 줄인다.
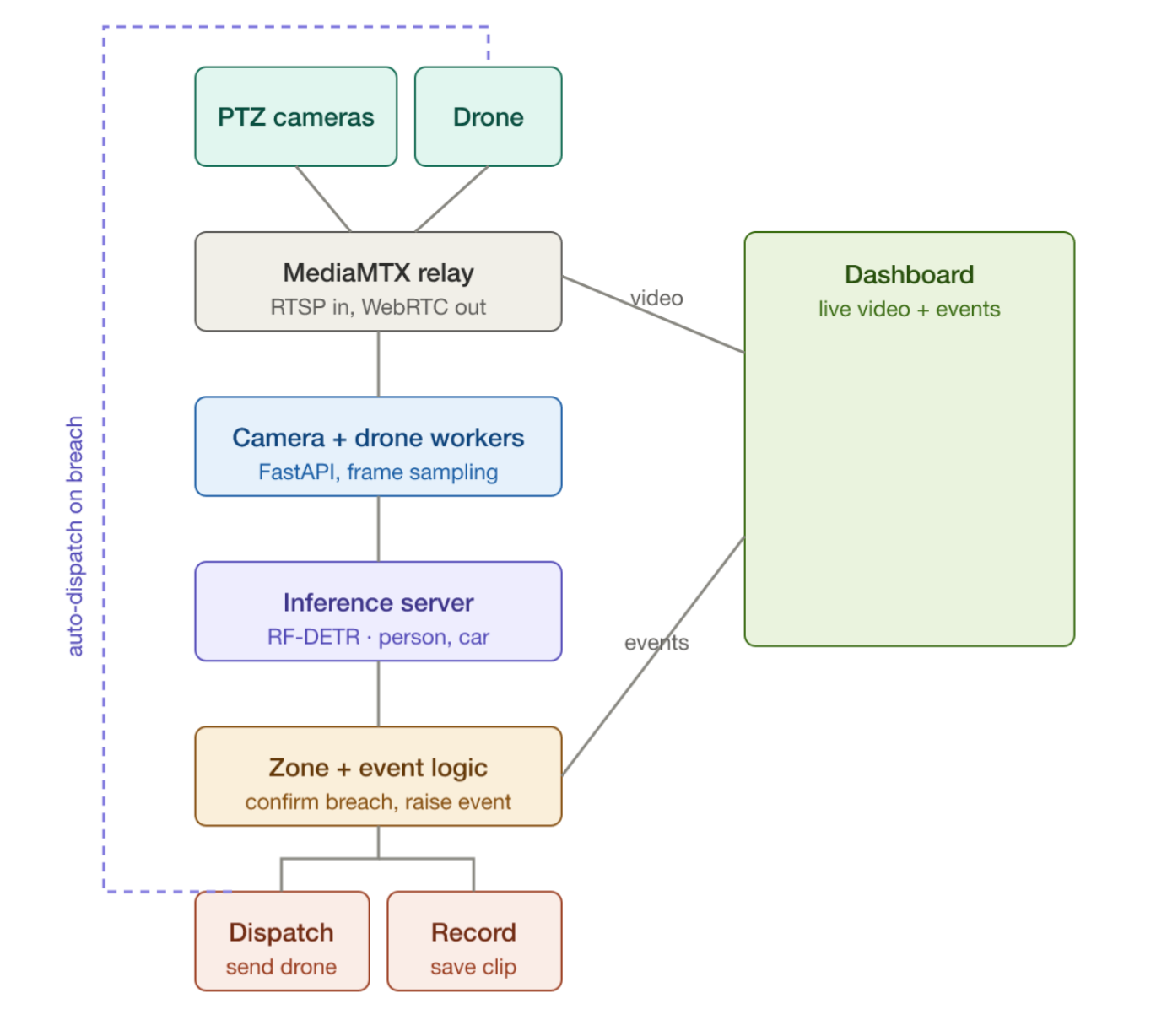
추론 파이프라인은 2초마다 한 프레임만 전송해 프레임별 추론을 피하고 RF-DETR로 사람과 자동차를 검출하며, ByteTrack으로 객체를 프레임 간 추적해 동일 객체의 지속 여부를 판별한다. PolygonZone으로 제한구역을 정의하고 트래커의 연속 위치 정보를 결합해 '지속 침범' 기준을 충족할 때만 이벤트를 확정한다. 이러한 조합은 일시적 통과와 실제 침입을 구분해 자동 출동의 오탐을 줄이는 실무적 트레이드오프를 제공한다.
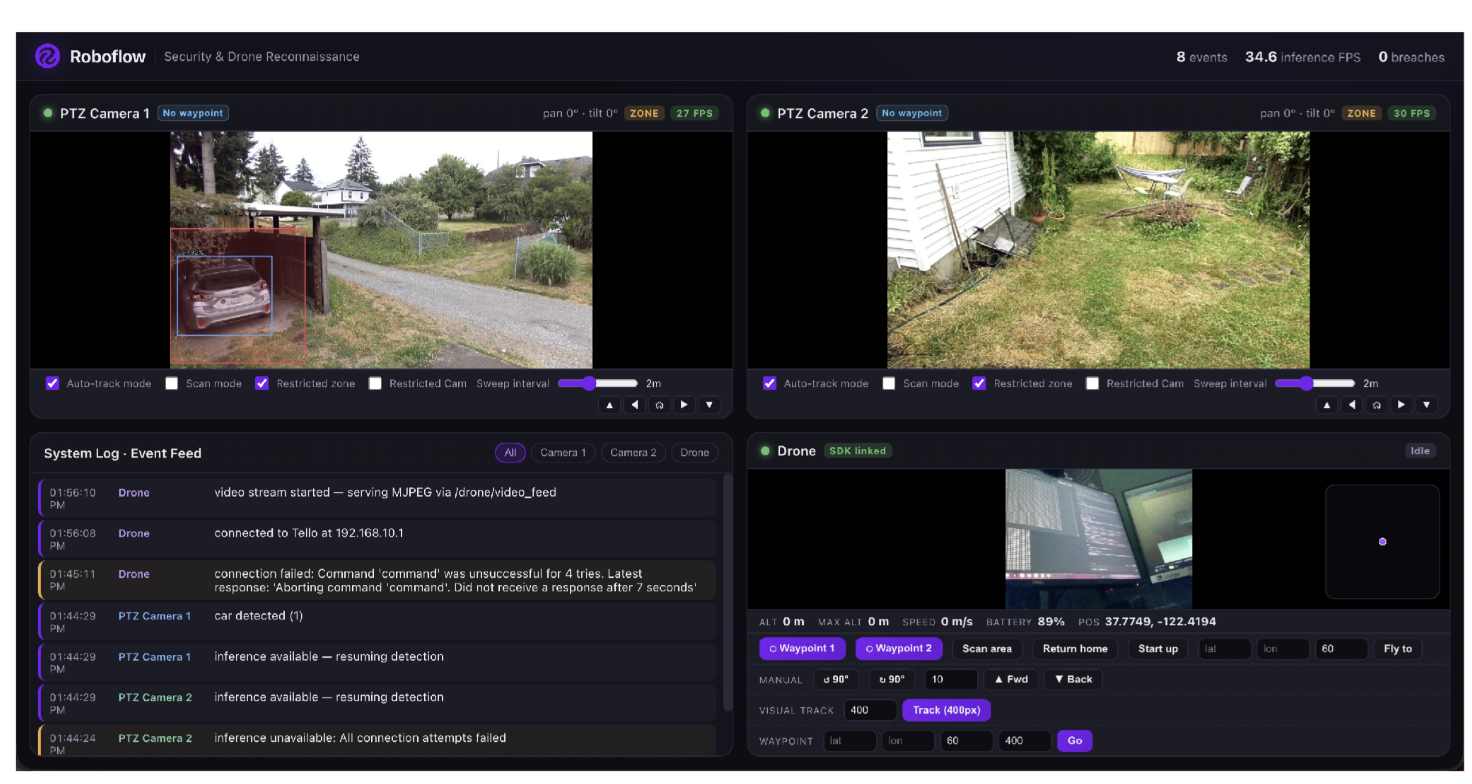
대시보드는 두 개의 PTZ 영상 창과 통합 이벤트 피드, 드론 패널(라이브 영상·텔레메트리·비행 경로 맵)을 2×2 레이아웃으로 표시하며 상단 헤더에 실시간 추론 FPS와 이벤트 수, 활성 침범 수를 노출한다. 확인된 침범은 zone 로직에서 자동으로 드론을 출동시키는 트리거로 연결되고 녹화가 병행되어 사건 근거를 확보한다. 이 자동화로 인간 개입 없이 초기 대응이 가능해지나, 설계 선택은 샘플링 주기·추론 모델의 정확도·트래커 성능에 민감해 한계와 조정 지점이 존재한다.
AI 분석 전체 내용 보기
AI 요약 · 북마크 · 개인 피드 설정 — 무료
출처 · 인용 안내
원문 발행 2026. 06. 30.수집 2026. 07. 01.출처 타입 RSS
인용 시 "요약 출처: AI Trends (aitrends.kr)"를 표기하고, 사실 확인은 원문 보기 기준으로 진행해 주세요. 자세한 기준은 운영 정책을 참고해 주세요.